1 引言
隨著(zhù)國內演出市場(chǎng)需求的變化,各種流動(dòng)演出和固定演出體量和規模逐漸增大,演出形式也日益豐富,因此,演出設備的種類(lèi)不斷變化,對演出設備的技術(shù)要求不斷提升。以流動(dòng)演出為例,之前幾乎都是固定設備為主,一般采用固定桁架搭臺,演出方式主要靠燈光音響來(lái)配合,但最近幾年演出形式開(kāi)始多樣化,涌現出了很多新穎的機械設備,如增加舞臺動(dòng)感效果的柔索并聯(lián)機器人、可編程矩陣球、機械臂、全向車(chē)臺、擬態(tài)機器人、無(wú)人機等演出設備,極大地豐富了演出的形式和內容(見(jiàn)圖1)。
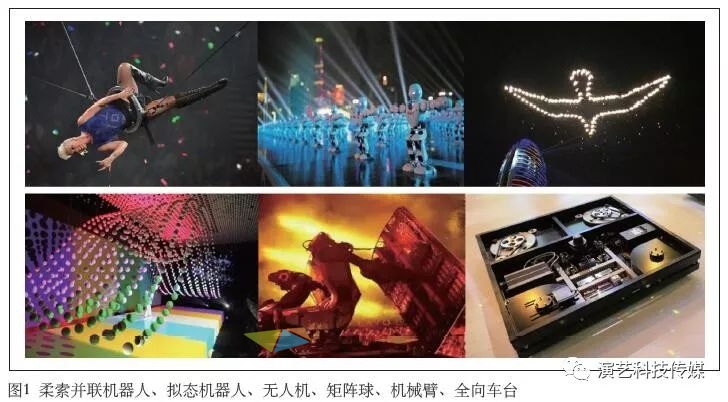
在演出中,加入矩陣球表演方式的舞臺,通過(guò)數量龐大的矩陣球的造型、色彩的變化,增加演出效果,有些矩陣球還可與演員互動(dòng)做出特殊造型;柔索并聯(lián)機器人,典型的為二維、三維威亞,可將人、攝像機、道具等在空中進(jìn)行快速移動(dòng),配合表演定位;采用機械臂的方式可裝載演出用的大型顯示屏,也可將燈光進(jìn)行托舉,同時(shí)通過(guò)編程還能將人與機械臂進(jìn)行互動(dòng),使演出模式更靈活,燈光的角度更加多樣;采用全向車(chē)臺則可以將道具或演員方便地移動(dòng)到舞臺的任意位置,使布景活起來(lái),與演員的表演融為一體;擬態(tài)機器人則可通過(guò)單獨表演或與演員配合的方式,形成單體或群體表演,豐富表演形式;無(wú)人機群則可以通過(guò)無(wú)人機構建大空間背景下的燈光造型展覽展示,使表演立體化,擴展舞臺空間。
下面針對上述幾種用于舞臺表演的機械設備的應用形態(tài)及實(shí)現功能展開(kāi)闡釋。
2 柔索并聯(lián)機器人
2.1應用形態(tài)
柔索并聯(lián)機器人是一類(lèi)特殊的并聯(lián)機器人,其末端動(dòng)平臺通過(guò)柔索與固定平臺連接,根據各支鏈協(xié)調變化索長(cháng)來(lái)實(shí)現其位置和姿態(tài)的改變。與傳統機器人相比,其具有慣性小、響應快、高速性能好、工作空間大等一系列優(yōu)點(diǎn)。
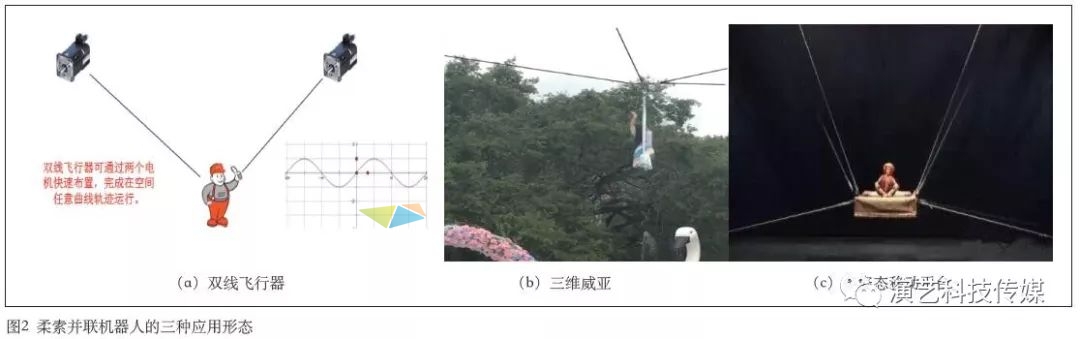
在演藝領(lǐng)域使用的柔索并聯(lián)機器人主要為各種威亞,包括兩軸驅動(dòng)的雙線(xiàn)飛行器,三軸四軸驅動(dòng)的三維威亞,更多鋼絲繩牽引驅動(dòng)的多姿態(tài)移動(dòng)平臺,如圖2所示。
舞臺上常規出現的為一維威亞,也叫單點(diǎn)吊機,主要用于表演人員或者物體的上升下降,表演形式相對單一。
二維威亞則分為多種,有采用升降平移分離的軌道威亞、索道威亞,也有兩臺單點(diǎn)吊機末端互聯(lián)形成的雙線(xiàn)飛行器。雙線(xiàn)飛行器相比軌道、索道威亞,不占用空間,可任意拆卸和任意組合,可控制人或道具在一個(gè)平面上進(jìn)行表演,不僅可以進(jìn)行上升下降的動(dòng)作,還可以進(jìn)行左右移動(dòng)的操作。
三維威亞通常采用四根繩索牽引,有X、Y、Z三個(gè)空間自由度,可以將演員或道具在三維空間中進(jìn)行任意位置的移動(dòng),實(shí)現舞臺立體空間的效果(見(jiàn)圖3)。多姿態(tài)移動(dòng)平臺則通過(guò)6~8根鋼絲繩牽引,除了可控制人或道具在空中的移動(dòng),還可控制物體的姿態(tài),比如傾斜等動(dòng)作。

雙線(xiàn)飛行器相比軌道和索道威亞,組合靈活,方便拆卸,受現場(chǎng)空間環(huán)境影響較小,如目前在建的恒大海花島項目觀(guān)眾廳就采用了十套雙線(xiàn)飛行器,演員可通過(guò)飛行器從觀(guān)眾席后端飛向舞臺。三維威亞目前應用場(chǎng)所較多,固定場(chǎng)所如銀川演藝中心、道真演藝中心、哈爾濱萬(wàn)達、滿(mǎn)秀等,流動(dòng)舞臺則比較常見(jiàn),如大型體育場(chǎng)館,各種演唱會(huì ),綜藝節目都有使用。多姿態(tài)移動(dòng)平臺目前主要是一些展覽展示在用,如2017年北京PALMEXPO(音響燈光展)上展出的八軸飛毯。
2.2技術(shù)要點(diǎn)
在演藝領(lǐng)域的應用中,柔索并聯(lián)機器人一般需滿(mǎn)足如下技術(shù)功能。
軌跡離線(xiàn)編程。編輯軌跡,設定需要經(jīng)過(guò)的軌跡點(diǎn),并通過(guò)軌跡自動(dòng)平滑等技術(shù)處理設定好的運行軌跡;同時(shí),還可設定軌跡的運行時(shí)間等,以及軌跡運行其他參數的設定和自檢;支持軌跡離線(xiàn)仿真。
示教功能。能將手動(dòng)運行的軌跡進(jìn)行記錄,并回放;可通過(guò)手柄先試運行軌跡,同時(shí)開(kāi)啟軌跡記錄功能,記錄完成后可將軌跡進(jìn)行完整的重現。
運行區域設定。可手動(dòng)設置運行區域, 保證系統在運行過(guò)程中不會(huì )運行過(guò)界和碰撞。
為了實(shí)現上述功能,系統一般需要采用多種算法,如基于樣條曲線(xiàn)的軌跡生成算法,基于S曲線(xiàn)的加減速控制算法,基于軌跡球控制的三維視圖控制算法等。
3 全向車(chē)臺
3.1應用形態(tài)
全向車(chē)臺也稱(chēng)萬(wàn)向車(chē)臺,通過(guò)規劃路徑,可完成車(chē)臺的全方向移動(dòng)及中央轉臺旋轉運動(dòng),用于實(shí)現切換布景和遷移演員。
在演出應用中,按照演藝節目編排要求編程控制車(chē)臺的行走路徑,車(chē)臺搭載演員或布景進(jìn)行上場(chǎng)或退場(chǎng)、在指定時(shí)間和位置表演旋轉等動(dòng)作,極大地豐富了藝術(shù)表演的形式。另外,它的真實(shí)研究?jì)r(jià)值不僅僅體現在演藝場(chǎng)所的藝術(shù)表演上,其蘊含的全輪驅動(dòng)結構、導航定位技術(shù)完全可以應用到車(chē)間、碼頭、船艦上的物流傳輸系統,在工業(yè)實(shí)際應用中有著(zhù)巨大的市場(chǎng)潛力。
需要說(shuō)明的是,在平昌冬奧會(huì )閉幕式上應用的全向車(chē)臺(見(jiàn)圖4),被很多人誤認為是智能機器人。其實(shí),全向車(chē)臺與目前的智能機器人有所區別,全向車(chē)臺更強調預編程行為,嚴格按照編輯好的動(dòng)作進(jìn)行表演,一般無(wú)法進(jìn)行自動(dòng)軌跡規劃等行為。

3.2技術(shù)要點(diǎn)
相比用于物流的全向移動(dòng)平臺,用于演出的全向車(chē)臺主要有如下技術(shù)需要解決。
軌跡規劃不同。不同于工廠(chǎng)制造環(huán)境,演出機器人的最大難題,來(lái)自于運動(dòng)姿態(tài)的多樣性,以及需要保證與演員表演、演出音樂(lè )、地面投影、場(chǎng)地燈光等的高度統一。傳統上工廠(chǎng)用的全向車(chē)臺(移動(dòng)機器人)側重于效率、精度和速度,這也直接決定了機器人的運轉路徑多以直線(xiàn)、圓弧為主,機器人的加減速度規劃曲線(xiàn)呈現一個(gè)規則的梯形。而用于演出領(lǐng)域的全向車(chē)臺(表演機器人)為了完成完整的舞美創(chuàng )意,僅靠直線(xiàn)和圓弧轉彎的動(dòng)作是遠遠不夠的,需要像芭蕾舞演員在旋轉的同時(shí),還可畫(huà)出優(yōu)美的弧形;同時(shí),還需要多臺表演機器人協(xié)調運轉。
適應環(huán)境復雜。由于演出過(guò)程中,有時(shí)候需要人員與車(chē)臺進(jìn)行互動(dòng),一般對于采用激光導航的車(chē)臺而言,遮擋比較嚴重,同時(shí)光干擾也較大,需解決導航環(huán)境不理想情況下的定位,比如慣性導航等。
多車(chē)臺拼接。演出過(guò)程中有時(shí)需要運送比較大的道具,需要車(chē)臺對接并完全同步運行。
全向車(chē)臺在演藝領(lǐng)域中的應用,一般需滿(mǎn)足如下技術(shù)功能。
軌跡離線(xiàn)編程。編輯軌跡,設定需要經(jīng)過(guò)的軌跡點(diǎn),并通過(guò)軌跡自動(dòng)平滑等技術(shù)處理設定好的運行軌跡;同時(shí),還可設定軌跡的運行時(shí)間等,以及軌跡運行其他參數的設定和自檢;支持軌跡離線(xiàn)仿真。
避障功能。一般通過(guò)內置激光避障和紅外等傳感器,并結合算法實(shí)現避障功能。
運行區域設定。可手動(dòng)設置運行區域, 保證系統在運行過(guò)程中不會(huì )運行過(guò)界和碰撞。
全向車(chē)臺的上述技術(shù)特征均有別于傳統劇場(chǎng)設備,某些編程手段與柔索并聯(lián)機器人類(lèi)似,也是機器人編程的一個(gè)分支,和物流機器人又有所不同,不需要自動(dòng)規劃路徑,需要嚴格按照編好的路徑進(jìn)行移動(dòng)。
4 矩陣球
4.1應用形態(tài)
矩陣球,也稱(chēng)動(dòng)態(tài)雕塑、懸浮球陣列,是由數百到數千個(gè)懸浮體組成的陣列,每個(gè)懸浮體通過(guò)一根拉線(xiàn)受控,可做垂直運動(dòng),每個(gè)懸浮體的運動(dòng)組成一體化的動(dòng)作。
動(dòng)態(tài)雕塑在計算機的控制下,以立體方式展現圖案、文字、變換的曲線(xiàn)曲面,伴隨音樂(lè )舞動(dòng),亦或靈動(dòng),亦或柔美,帶給觀(guān)眾極強的視覺(jué)沖擊感,具有超乎想像的展示效果,在科技館、展廳、大型商場(chǎng)、舞臺等演藝娛樂(lè )場(chǎng)合迅速地應用,圖5所示為動(dòng)態(tài)雕塑在舞臺上的應用場(chǎng)景。

4.2技術(shù)要點(diǎn)
為了實(shí)現系統的高動(dòng)態(tài)特性和易操作特性,系統采用伺服+高速工業(yè)以太網(wǎng)的方案來(lái)實(shí)現,動(dòng)態(tài)雕塑由一個(gè)個(gè)一體化懸浮體組成,運用分布式實(shí)時(shí)控制、伺服控制等技術(shù)。每個(gè)懸浮體安裝簡(jiǎn)單,通過(guò)標準化的緊固件固定在吊頂鋼架上;電氣部分只需要多芯插座連接,一般的工人即可以完成安裝;整體采用無(wú)機柜無(wú)機房設計,簡(jiǎn)化運維成本,用戶(hù)通過(guò)計算機軟件可以靈活地控制懸浮陣列的場(chǎng)景變換。
目前動(dòng)態(tài)雕塑的實(shí)現主要有兩種技術(shù)方式。
一般應用于高速高精度場(chǎng)合,系統運行結構采用伺服電機,每個(gè)伺服電機間通過(guò)高速工業(yè)以太網(wǎng)來(lái)布置控制網(wǎng)絡(luò ),每個(gè)運動(dòng)部件的速度可達到幾米每秒的運行速度。系統針對雕塑的編程采用專(zhuān)業(yè)的編程軟件來(lái)實(shí)現,編程方式相對靈活多樣。
一般應用于要求相對較低的場(chǎng)合,方案采用DMX512信號來(lái)控制每個(gè)點(diǎn),電機一般采用步進(jìn)電機,軟件編程通常采用現成的燈光控制臺進(jìn)行編程,運行速度較慢,編程較為繁瑣。
軟件(見(jiàn)圖6)一般應具備如下的功能。
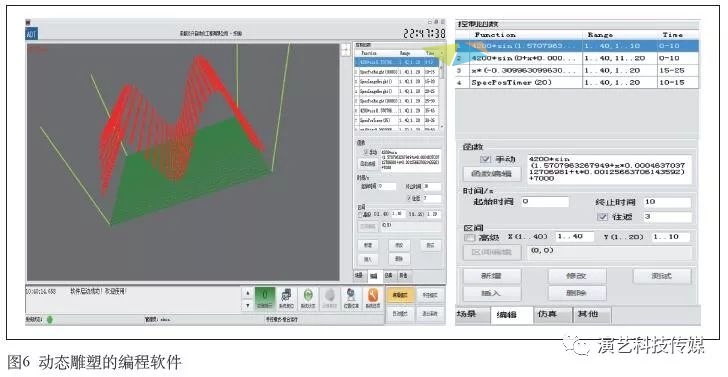
固定模型編輯:可編輯某個(gè)區域的動(dòng)態(tài)雕塑按照設定好的數學(xué)函數進(jìn)行運行,如正弦余弦、直線(xiàn)、斜面等固定的模型。
字符編輯:可將動(dòng)態(tài)雕塑用于顯示字符,如數字、漢字、英文字母等。
圖形編輯:可將動(dòng)態(tài)雕塑顯示固定的畫(huà)面。軟件可對圖形進(jìn)行預處理,包括調整灰度值等處理功能。
自定義函數編輯:可用于任意函數編輯,用于顯示用戶(hù)指定的特殊函數,如特定的曲面曲線(xiàn)等信息。
5 機械臂
5.1應用形態(tài)
對于演藝行業(yè)來(lái)說(shuō),機械臂誠然是玩轉舞臺的點(diǎn)睛之筆。尤其是隨著(zhù)技術(shù)的不斷更新,機械臂已然全面進(jìn)入演藝領(lǐng)域,LED顯示屏可以在機械臂的掌控下隨意飛行、拼接、拆分、旋轉,在舞臺空間形成各種造型的LED背景顯示。機械臂也可與多媒體、燈光、音樂(lè )“共舞”。
與目前常規的舞臺機械相比較,機械臂有體積大、自由度多、慣量大、速度快、精度高、安全性和可靠性要求高等特點(diǎn)。多數廠(chǎng)家采用購買(mǎi)現成的工業(yè)機器人來(lái)完成,比如“珠江紅船”上的演出采用的是傳統常規的機器人(見(jiàn)圖7),借此加入很多表演元素,采用人與機械臂互動(dòng)的方式來(lái)增加表演效果。但也存在特殊情況,如傳統常規的機器人由于載荷、形狀等無(wú)法滿(mǎn)足演出要求,需特別定制開(kāi)發(fā),如武漢“漢秀”采用的機器人(見(jiàn)圖8)。

5.2技術(shù)要點(diǎn)
由于工業(yè)機器人產(chǎn)業(yè)已經(jīng)發(fā)展多年,機械臂相對成熟度較高,已經(jīng)應用于工業(yè)場(chǎng)合多年,有豐富的應用經(jīng)驗。基于機械臂的機器人多數采用現有的軟硬件來(lái)完成,比如采用機器人的示教功能,將動(dòng)作進(jìn)行示教規劃,使得機械臂能按導演要求進(jìn)行動(dòng)作重現;也可通過(guò)機器人控制接口,發(fā)送目標點(diǎn)給機器人,通過(guò)額外的人機交互功能來(lái)完成指令的下發(fā)和執行。目前,也有很成熟的編程功能滿(mǎn)足使用需求,應用時(shí)一般需要了解機器人自帶的功能即可;也可使用第三方編程軟件,如RobotMaster,RobotArt,RobotWorks等軟件,按照演出需求進(jìn)行預編程,并可實(shí)現離線(xiàn)編程。
6 擬態(tài)機器人
6.1應用形態(tài)
目前,擬態(tài)機器人被運用到舞臺表演主要是作為伴舞,表演的形式通常是幾十臺機器人組成方陣隨著(zhù)背景音樂(lè )或歌手的演唱翩翩起舞,加之機器人身上LED燈的七彩變幻,達到一種科技與律動(dòng)結合的效果。擬態(tài)機器人本身的科技含量其實(shí)并不高,是通過(guò)所謂“舵機”(一種廉價(jià)小型伺服電機)來(lái)控制各個(gè)關(guān)節,先根據舞美的要求預先設定好舞蹈程序,每個(gè)舵機按時(shí)間順序向不同的角度移動(dòng),從而有了跟著(zhù)音樂(lè )的舞步。
整個(gè)舞蹈程序以無(wú)線(xiàn)觸發(fā)方式啟動(dòng),這樣所有擬態(tài)機器人可以在同一時(shí)刻啟動(dòng)整個(gè)舞蹈程序。雖然擬態(tài)機器人本身技術(shù)難度不大,但是要使數量如此之多的機器人同時(shí)按一個(gè)既定的程序動(dòng)起來(lái),并且運行穩定不出錯,也不是一件容易的事,這里面需要花大量時(shí)間對機器人進(jìn)行調試。Alpha 1S在2016年央視春晚首次亮相便大獲成功(見(jiàn)圖9),它擁有16個(gè)關(guān)節自由度,可模仿人的肢體動(dòng)作,雙眼裝有藍光LED,按程序指令閃爍。2018年央視春晚主會(huì )場(chǎng)的大開(kāi)場(chǎng)節目中,擬態(tài)狗的特別版機器人“Jimu汪汪”驚艷亮相(見(jiàn)圖10),不僅與舞臺上的演員精彩聯(lián)動(dòng),還被分別擺放在臺下的24個(gè)圓桌上與現場(chǎng)觀(guān)眾進(jìn)行互動(dòng),成為一大亮點(diǎn)。

6.2 技術(shù)要點(diǎn)
擬態(tài)機器人用于演藝領(lǐng)域中,往往是群體應用,在調試好每個(gè)單個(gè)擬態(tài)機器人的動(dòng)作、姿態(tài)、位置后,還要考慮群體的同步性和一致性,這對于信號的傳輸距離、抗干擾能力及機器人接收信號的靈敏度都會(huì )有一定的要求。
擬態(tài)機器人作為新興的機器人分支,每個(gè)廠(chǎng)家都有自己的編程軟件,有些機器人本身就支持二次編程功能,用戶(hù)可以自行編輯程序,而無(wú)需具備系統專(zhuān)業(yè)的編程知識;也可通過(guò)第三方的軟件編出復雜的動(dòng)作。從技術(shù)應用層面而言難度相對較低。
7 無(wú)人機
7.1應用形態(tài)
對于大多數的中國觀(guān)眾來(lái)說(shuō),在電視上看到無(wú)人機進(jìn)行藝術(shù)表演,應該是在2016年央視春節聯(lián)歡晚會(huì )。此后的2017年央視春晚、2018年央視春晚,無(wú)人機表演成了不可或缺的亮點(diǎn)。幾十架無(wú)人機就像螢火蟲(chóng)一般,雖然每一個(gè)無(wú)人機只有點(diǎn)點(diǎn)微光,但是匯集在一起之后,就能組成如夢(mèng)境般的畫(huà)面。又如2018年2月的平昌冬奧會(huì ),幾百架無(wú)人機在空中組成了奧運五環(huán),體現了新時(shí)代的新技術(shù)與奧林匹克這一古老盛會(huì )的完美融合(見(jiàn)圖11)。

7.2技術(shù)要點(diǎn)
對于無(wú)人機本身的技術(shù)分析,不是本文的描述重點(diǎn)。把無(wú)人機運用到演藝創(chuàng )作中,真正的技術(shù)難度說(shuō)到底還是移動(dòng)機器人的問(wèn)題,與全向車(chē)臺面對的難點(diǎn)類(lèi)似。但是無(wú)人機更多的時(shí)候是在三維空間中的飛行造型,所以面對的問(wèn)題特別是定位更加復雜。概括起來(lái),無(wú)人機編組控制有如下難點(diǎn)。
時(shí)鐘問(wèn)題,是指如何為多架無(wú)人機進(jìn)行時(shí)鐘同步或如何使多架無(wú)人機的系統時(shí)間一致。這個(gè)問(wèn)題是演藝設備行業(yè)的一個(gè)普遍難題,當一個(gè)系統內設備數量多了之后,如何保證每個(gè)系統或子系統內各個(gè)設備的時(shí)鐘一致。不同的授時(shí)方案決定了不同的時(shí)間掃描周期,例如GPS可以小于1 ms,電波授時(shí)在1 ms左右,NTP網(wǎng)絡(luò )授時(shí)在50 ms左右。
定位問(wèn)題,包括空間定位和定位精度,是指如何測量多架無(wú)人機的位置及獲取每架無(wú)人機位置的準確程度。常用的方案有光學(xué)動(dòng)(亞毫米級精度)、光流定位(毫米級精度)、UWB定位(厘米級精度)、RTKGPS定位(分米級精度)、GPS定位(米級精度)等。
導航問(wèn)題,是指導引和控制無(wú)人機按舞美要求飛行在預定軌道的技術(shù)和方法。制導過(guò)程中,導航系統要在系統時(shí)間周期內不斷掃描更新無(wú)人機與預定軌道的相對位置關(guān)系,發(fā)出導航信息給無(wú)人機控制系統,對飛行軌跡和每個(gè)無(wú)人機的姿態(tài)做閉環(huán)控制。
路徑規劃,是指按照舞美要求設置預定軌道的過(guò)程與方法,分為人工規劃或自動(dòng)規劃。一般不超過(guò)100架無(wú)人機的規模可以采用人工規劃,而當飛行器數量大于此值后,自動(dòng)規劃則成為超大規模編隊的必要核心技術(shù),通常采用的方法有基于網(wǎng)格地圖的搜索算法、人工勢場(chǎng)法、或蟻群算法等特殊的路徑優(yōu)化方法。
8 結語(yǔ)
目前,舞臺演出形式越來(lái)越多樣化,不斷地引入了其他行業(yè)的技術(shù)成果,形成舞臺上融合演出模式,以滿(mǎn)足各種創(chuàng )意需求,如迪斯尼寶藏灣就將大型的風(fēng)洞引入了表演中,配合演出達到懸空的效果;再如張藝謀2047中表演的云紗秀,就是將空氣動(dòng)力學(xué)融入到舞臺中進(jìn)行表演。典型演出設備與新技術(shù)手段的應用豐富了舞臺表演形式,將帶給觀(guān)眾更多震撼的視聽(tīng)感受。
選自《演藝科技》2018年第4期 侯鵬強《豐富舞臺表演形式的典型設備與應用》,轉載請標注:演藝科技傳媒。更多詳細內容請參閱《演藝科技》。